在全球智能制造和 人工智能蓬勃发展的背景下,机器人灵巧手作为一种新型末端执行器,正在自动化生产线、医疗康复等领域发挥越来越重要的作用。其核心在于模拟人手的精细结构和功能,能够完成抓取、装配等高精度、高灵活性的复杂作业。不仅广泛应用于工业生产,在服务机器人和医疗康复等前沿领域也展现出巨大的应用潜力。
自20世纪70年代以来,全球科研机构对灵巧手的研究从未停止。从最初的三指结构发展到如今高度仿真的五指设计,技术的进步显著提升了系统的驱动、传动和传感能力。特别是21世纪以来,嵌入式技术的快速发展,使得多指灵巧手朝着高集成度、精细感知的方向发展。然而,传统多指灵巧手的高昂制造成本、复杂结构和繁琐维护,也限制了其大规模应用。
为了克服这些挑战,近年来灵巧手设计理念转向轻量化、模块化、高鲁棒性和低成本。这一转变促进了技术的普及,也为灵巧手在更多领域的应用奠定了基础。轻量化设计降低了能耗,模块化设计方便了维护和升级,高鲁棒性保证了其在复杂环境下的稳定运行,而低成本则拓展了其应用范围。
灵巧手的核心技术在于驱动、传动和传感系统的协同作用。高效、低噪、易控的电机驱动成为主流,为灵巧手提供动力。传动系统则决定了灵巧手的精度和速度,腱绳传动、齿轮传动和连杆传动各有优劣,适用于不同的应用场景。而力传感器和触觉传感器组成的传感系统,赋予了灵巧手感知环境、精准操作的能力,如同其“眼睛”一般。
随着多自由度设计的普及,灵巧手的灵活性和功能性得到显著提升,能够完成更复杂的任务。例如,兆威机电最新推出的灵巧手拥有17个自由度,单指配备3个及以上的主动执行单元,接近人手22个自由度的水平,可执行复杂的抓握任务。其内置的微驱动控制器主频高达600MHz,定位误差小于0.3°,最大效率超过95%,保证了数据传输的准确性和及时性。这充分体现了灵巧手技术在微操作和复杂环境中的显著优势。
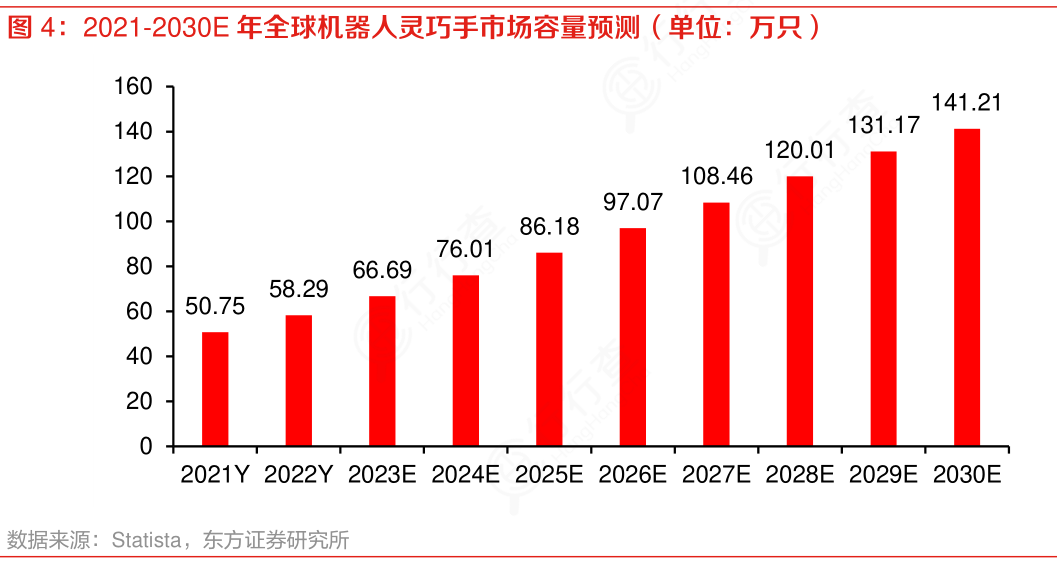
未来,机器人灵巧手的市场需求将持续增长,其在工业、服务机器人和医疗康复领域的应用前景广阔。市场预测显示,全球机器人灵巧手市场容量将在未来几年内实现快速增长。未来发展趋势包括微型驱动器布局的优化、多感知功能的融合以及多自由度设计的仿生化优化,这些创新将进一步提升灵巧手的灵活性和智能化水平,使其在更广泛的应用场景中具有更强的竞争力。
AI.
机器人灵巧手的快速发展不仅重塑了工业制造和服务领域的生产模式,也为未来人机协作提供了强大的技术支撑。作为新一轮技术革命的重要组成部分,灵巧手正引领智能制造迈向更加灵活、高效、智能的新时代。
© 版权声明
文章版权归作者所有,未经允许请勿转载。
相关文章
暂无评论...
